
{kind=link}
Канадарм (или же комплексная система удаленного манипулятора шаттл) была разработана еще в середине 20 века в столице Канады. Канадарм — это целая линейка роботизированных манипуляторов. Их применяют на орбитальных кораблях шаттлов в основном для развертывания, осуществления маневров, а также захвата полезной нагрузки. Самая первая миссия шаттла Канадарм состоялась в 1981 году, а последняя миссия Канадарм была осуществлена 2011 году. Всего за свою историю Канадарм выполнил более 90 успешных миссий на орбите. Далее на iottawa.net.
История создания Канадарм
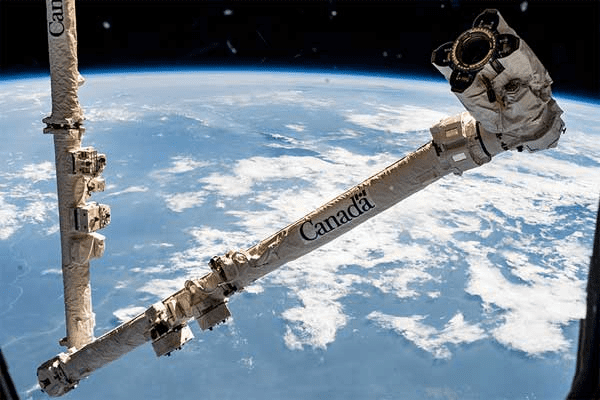
В конце 1960-х годов Канада была прогрессивной страной во всех сферах, она стремительно развивалась и внедряла новые технологии в разных отраслях, поэтому была приглашена как одна из стран лидеров на участие в программе “Спейс шаттл” от НАСА. В то время, НАСА очень привлекла разработка одной из канадских компаний — робота, который может загружать топливо в ядерные реакторы Канду. Комплекс манипуляторов был очень важной составляющей в аэронавтике. Поэтому с середины 1970-х годов Канадский национальный исследовательский совет подписал меморандум, в соответствии с которым в Оттаве будут проектировать и строить Канадарм. В рамках данного соглашения канадцами были проведены не только работы по разработке и строительству, но также были проведены испытания и оценка конструкции. Всего было сооружено три системы:
- инженерный образец для проектирования и испытания Канадарм;
- квалификационный образец, над которым проводили экологические испытания для прохождения дальнейшей квалификации и допуска к использованию в космосе;
- летний образец.
Что можно осуществлять с помощью Канадарм?
Канадарм был предназначен для аэронавтики. С его помощью в космосе можно:
- извлекать спутники;
- ремонтировать спутники;
- разворачивать спутники;
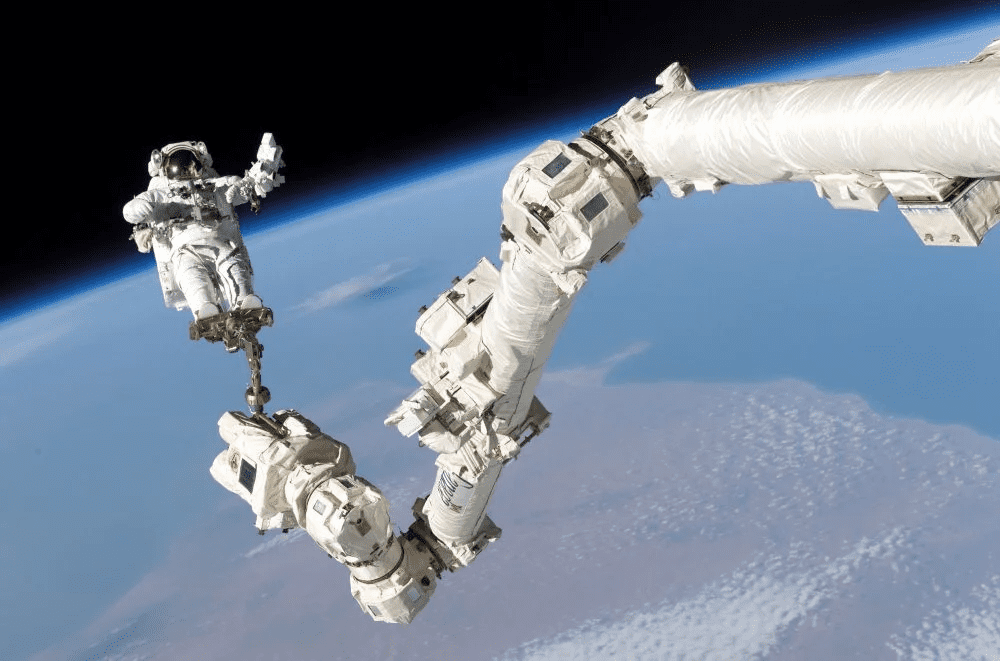
- оказывать помощь членам экипажа и рабочим, в частности предоставлять лестницу;
- просматривать поверхность орбитального корабля и его полезной нагрузки;
- размещать полезную нагрузку весом до 29 тысяч килограмм, с 1990-х годов возможность размещать полезную нагрузку увеличилась до 266 тысяч килограмм.
Управление Канадарм может осуществляться несколькими рабочими станции или экипажа. Один из рабочих в кормовой кабине с поста управления управляет Canadarm. Параллельно, второй рабочий помогает с работой камеры. Это дает возможность оператору манипулятора Канадарм следить за всеми его операциями.
Космическая разработка Канадарм состоит из:
- манипулятора;
- панели управления;
- дисплея;
- компонентов, которые взаимодействуют между собой.
Применение Канадарм в космосе
Если первые разработки Канадарм начались в конце 1960-х годов-в начале 1970-х годов, то впервые испытать Канадарм в космосе удалось только в начале 1980-х годов.
В 1981 году, в рамках специальной миссии Канадарм был испытан на орбите. Его применили, в частности, для маневрирования . После проведения успешных испытаний Канадарм начали широко использовать в самых разных космических миссиях.
За свою историю манипулятор Канадарм совершил более 90 космических миссий. Его самая последняя миссия состоялась в 2011 году. Тогда Канадарм была поставлена задача доставить многоцелевой логистический модуль Рафаэлло МПЛМ от НАСА на международную космическую станцию и обратно на Землю. После завершения последней миссии, образец Канадарм был отправлен на свою родину — в Канаду. Все желающие жители Канады, а также туристы могут увидеть легендарную космическую разработку в Канадском музее авиации и космонавтики в Оттаве.