
{kind=link}
Канадарм (або комплексна система віддаленого маніпулятора шатл) була розроблена ще в середині 20 століття в столиці Канади. Канадарм – це ціла лінійка роботизованих маніпуляторів. Їх застосовують на орбітальних кораблях шатлів переважно для розгортання, здійснення маневрів і навіть захоплення корисного навантаження. Найперша місія шатла Канадарм відбулася у 1981 році, а остання місія Канадарм була здійснена у 2011 році. Загалом за свою історію Канадарм виконав понад 90 успішних місій на орбіті. Далі на iottawa.net.
Історія створення Канадарм
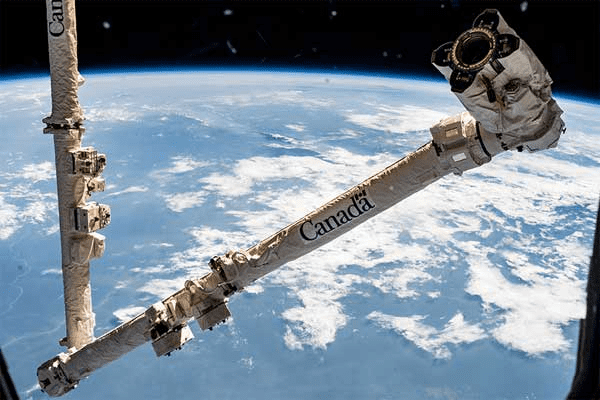
Наприкінці 1960-х років Канада була прогресивною країною у всіх сферах, вона стрімко розвивалася та впроваджувала нові технології у різних галузях, тому була запрошена як одна з країн лідерів до участі в програмі “Спейс шатл” від НАСА. У той час НАСА дуже зацікавила розробка однієї з канадських компаній – робота, який може завантажувати паливо в ядерні реактори Канду. Комплекс маніпуляторів був дуже важливою частиною в аеронавтиці. Тому з середини 1970-х років Канадська національна дослідницька рада підписала меморандум, відповідно до якого в Оттаві проєктуватимуть та будуватимуть Канадарм. У рамках цієї угоди канадцями були проведені не тільки роботи з розробки та будівництва, але також були проведені випробування та оцінка конструкції. Усього було споруджено три системи:
- інженерний зразок для проєктування та випробування Канадарм;
- кваліфікаційний зразок, над яким проводили екологічні випробування для проходження подальшої кваліфікації та допуску до використання у космосі;
- льотний зразок.
Що можна здійснювати за допомогою Канадарм?
Канадарм був призначений для аеронавтики. За допомогою нього в космосі можна:
- вилучати супутники;
- ремонтувати супутники;
- розгортати супутники;
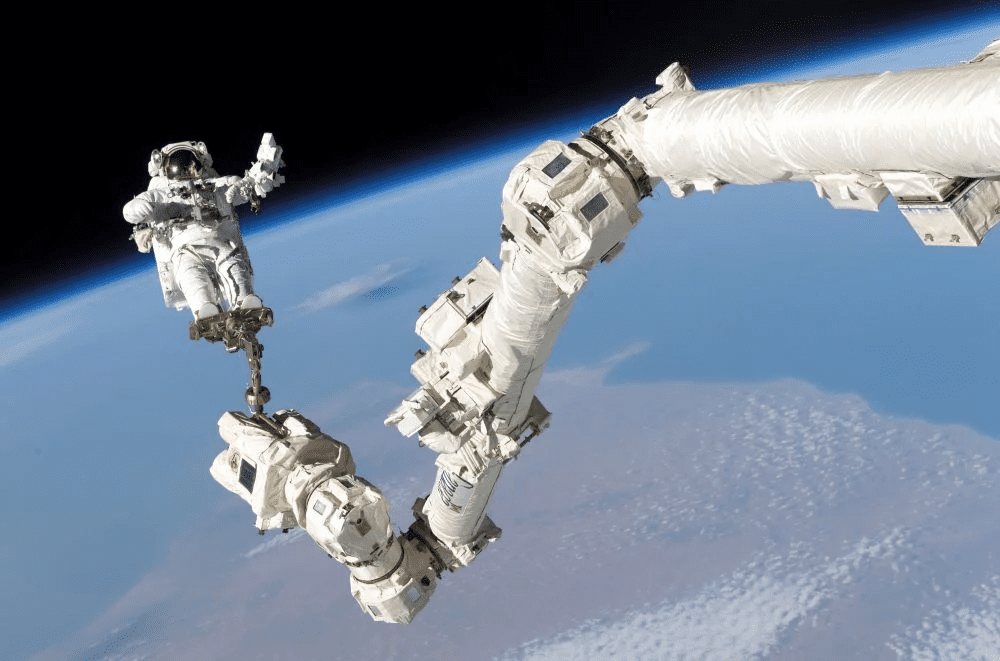
- надавати допомогу членам екіпажу та робітникам, зокрема у вигляді сходів;
- переглядати поверхню орбітального корабля та його корисного навантаження;
- розміщувати корисне навантаження вагою до 29 тисяч кілограмів, з 1990-х років можливість розміщувати корисне навантаження збільшилася до 266 тисяч кілограмів.
Управління Канадарм здійснюється кількома робітниками станції або екіпажу. Один з робітників у кормовій кабіні з центру управління управляє Canadarm. Паралельно, другий робітник допомагає із роботою камери. Це дає можливість оператору маніпулятора Канадарм стежити за його операціями.
Космічна розробка Канадарм складається з:
- маніпулятора;
- панелі керування;
- дисплея;
- компонентів, які взаємодіють між собою.
Застосування Канадарм у космосі
Якщо перші розробки Канадарм почалися наприкінці 1960-х років – на початку 1970-х років, то вперше випробувати Канадарм у космосі вдалося лише на початку 1980-х років.
У 1981 році, в рамках спеціальної місії Канадарм був випробуваний на орбіті. Його застосували, зокрема, для маневрування. Після проведення успішних випробувань Канадарм почали широко використовувати в різних космічних місіях.
За свою історію маніпулятор Канадарм здійснив понад 90 космічних місій. Його остання місія відбулася у 2011 році. Тоді Канадарм було поставлено завдання доставити багатоцільовий модуль логістичного Рафаелло МПЛМ від НАСА на міжнародну космічну станцію і назад на Землю. Після завершення останньої місії зразок Канадарм був відправлений на свою батьківщину – до Канади. Усі охочі жителі Канади, а також туристи можуть побачити легендарну космічну розробку у Канадському музеї авіації та космонавтики в Оттаві.