
{kind=link}
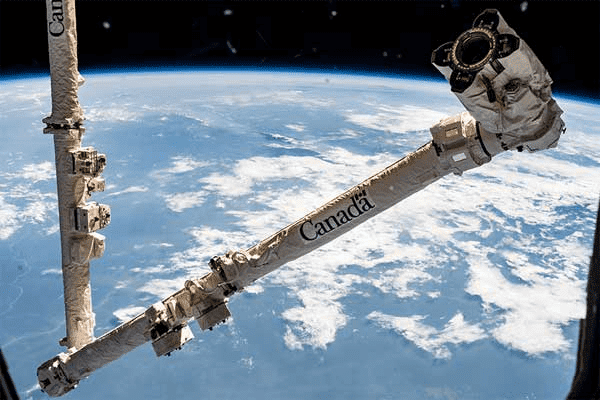
The Canadarm, officially known as the Shuttle Remote Manipulator System (SRMS), was developed in the mid-20th century in Canada’s capital, Ottawa. This groundbreaking line of robotic arms was designed for use on space shuttles to deploy, maneuver, and capture payloads. The Canadarm’s first mission took place in 1981, and its final mission occurred in 2011. Over its lifespan, Canadarm successfully completed more than 90 orbital missions. Learn more at iottawa.net.
The History of Canadarm’s Development
In the late 1960s, Canada was a leader in innovation and technology, making it an ideal participant in NASA’s Space Shuttle Program. NASA was particularly impressed by a Canadian-developed robot used to refuel CANDU nuclear reactors. Recognizing the importance of manipulator systems in aerospace, NASA invited Canada to contribute.
In the mid-1970s, the National Research Council of Canada signed a memorandum of understanding to design and build the Canadarm in Ottawa. This agreement included not only the design and construction but also the testing and evaluation of the system. Three prototypes were developed:
- Engineering model for design and testing;
- Qualification model for environmental testing and approval for space use;
- Flight model, the final version used in missions.
Capabilities of Canadarm
The Canadarm was designed for a variety of aerospace applications, including:
- Retrieving satellites;
- Repairing satellites;
- Deploying satellites;
- Assisting crew members, including acting as a ladder;
- Inspecting the shuttle’s exterior and payloads;
- Handling payloads weighing up to 29,000 kg, with this capacity increased to 266,000 kg in the 1990s.
The Canadarm was operated by a team of station or shuttle crew members. One operator in the aft cabin at the control center managed the Canadarm, while a second crew member assisted by monitoring the camera feed. This coordination ensured precise and safe operation of the manipulator.
The Canadarm system consisted of:
- The manipulator arm;
- A control panel;
- A display;
- Interconnected components for seamless operation.
Although development of the Canadarm began in the late 1960s and early 1970s, its first space test occurred in the early 1980s.
In 1981, during a special mission, Canadarm was successfully tested in orbit. It was used to perform maneuvers, proving its functionality and reliability. Following this success, the Canadarm became a critical component of various space missions.
Over its history, the Canadarm completed over 90 missions, with its final deployment in 2011. This mission involved delivering NASA’s Raffaello MPLM (Multipurpose Logistics Module) to the International Space Station and safely returning it to Earth. After this final mission, the Canadarm was returned to Canada and is now displayed at the Canada Aviation and Space Museum in Ottawa, where visitors and tourists can view this legendary piece of space technology.